Well, I updated the source code of the antenna rotator controller with magnetic declination entry and UI modifications.
1) Set Point Entry (Press * then enter the set point value and press # to confirm)
2) Inflight ( Hold Key 6 until the inflight filed become empty, then enter the Inflight and press# to confirm
3)Magnetic Declination angle (Hold Key 7 then enter the Magnetic Declination angle then # to confirm)
4) Magnetic Declination minute (Hold Key 8 then enter the Magnetic Declination minute then # to confirm)
5)Magnetic Declination East/West (Hold Key -9 then enter the Magnetic Declination East/West (Press 1 for East and 2 for West) then # to confirm)
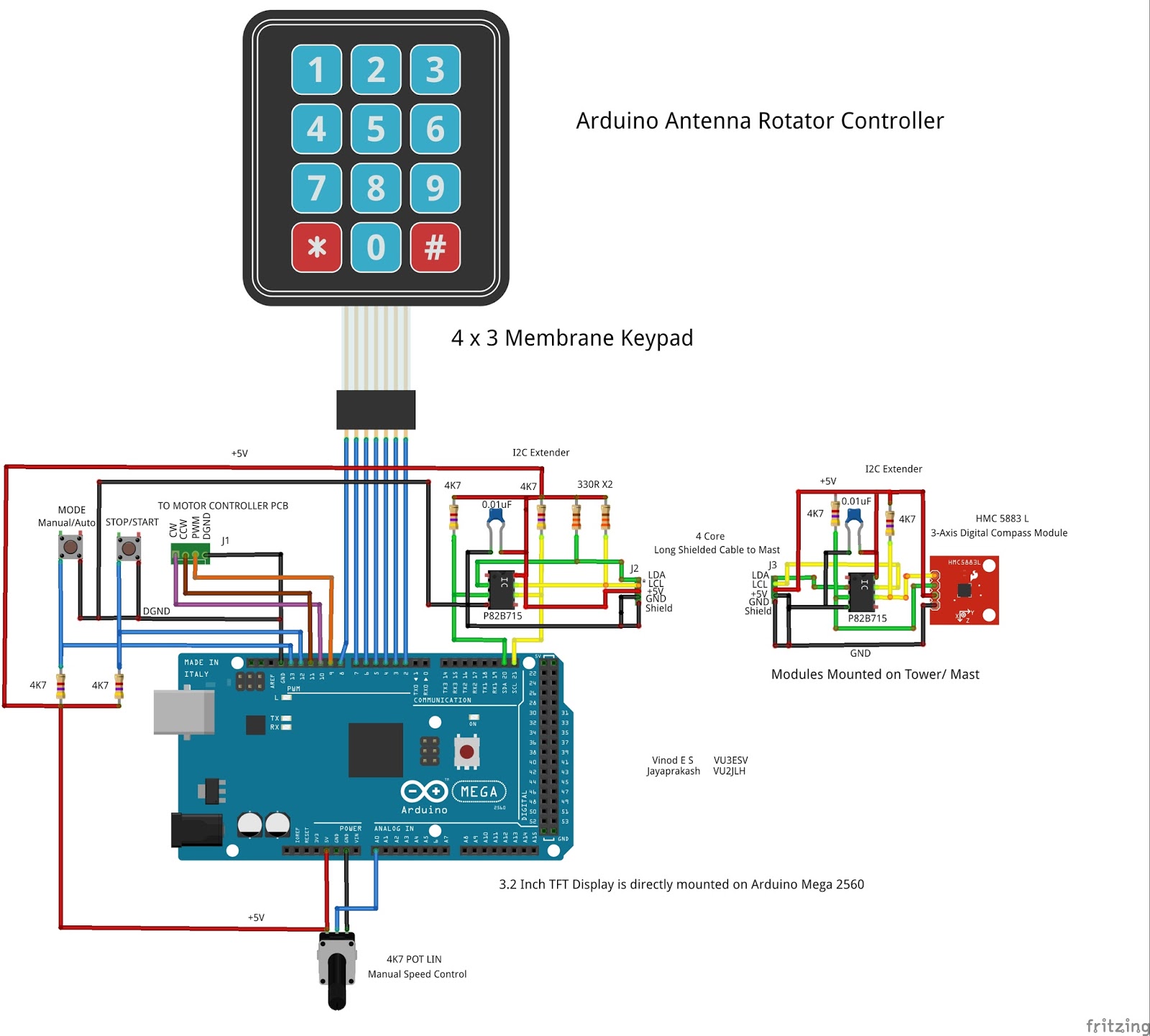
Image :

Source Code:
/*
* An Arduino code of Antenna Rotator Controller.
* Copyright (c) 2016 Vinod E S (VU3ESV) , Jayaprakash L V (VU2JLH)
* Version 1.0 - initial release
* Version 1.1 - Inflight Entry after holding the "*" Key for 3 seconds
* Version 10.0 - Magnetic Declination and Display restructuring
* Version 11.0 - Key pad Entry changes
1) Press * then enter the Set Pont then # to confirm
2) Hold 6 then enter the Inflight then # to confirm
3) Hold 7 then enter the Magnetic Declination angle then # to confirm
4) Hold 8 then enter the Magnetic Declination minute then # to confirm
5) Hold 9 then enter the Magnetic Declination East/West (Press 1 for East and 2 for West) then # to confirm
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in
* all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
* THE SOFTWARE.
Harware Information :-
1) Arduino Mega 2560R3 or its clones
2) HMC5883L Accelerometer
3) I2C Expander (NXP) P82B715
4) 3.2 Inch TFT Display
5) Momentary push button switchs with 4K7 pull up Resistors
6) 4K7 Potentiometer
7) Controller Circuit for Driving Motors see documents attached in this blog for a possible configuration
*/
#include <Wire.h> //I2C Arduino Library
#include <UTFT.h> // UTFT Library from Henning Karlsen (http://www.rinkydinkelectronics.com/library.php)
#include <UTFT_Geometry.h> //UTFT Geometry Library from Henning Karlsen (http://www.rinkydinkelectronics.com/library.php)
#include <Keypad.h>
#include <EEPROM.h>
const int X = 320;
const int Y = 160;
const int dm = 130;
const int x_Offset = 30;
const int y_Offset = 128;
const int z_Offset = 0;
const byte rows = 4; // Four rows
const byte cols = 3; // Three columns
const int maxDegreeDigits = 3; //maximum allowed input length
const int fixedInflight = 5;
const long maxInflight = 25;
const long maxDeclinationDegree = 99;
const long maxDeclinationMinute = 59;
extern uint8_t BigFont[];
extern uint8_t SmallFont[];
extern uint8_t SevenSegmentFull[];
#define BLACK 0x0000
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define ORANGE 0xFF00
#define address 0x1E //0011110b, I2C 7bit address of HMC5883
#define EEPROM_ModeStatus_Location 10 // The starting address of the EEPROM where the data is Stored (10.11.12.13)
#define EEPROMSetpointLocation 14
#define EEPROM_ScaleMax_Location 18
#define EEPROMInflightLocation 22
#define EEPROMMagDeclinationDegreeLocation 26
#define EEPROMMagDeclinationMinuteLocation 30
#define EEPROMMagDeclinationSignLocation 34
struct EEPROMValue //EEPROM Data Structure : Taken from G0MGX DDS VFO Code
{
union{
long Value;
struct
{
unsigned char Byte1;
unsigned char Byte2;
unsigned char Byte3;
unsigned char Byte4;
}
__attribute__((packed));
}
__attribute__((packed));
}
__attribute__((packed));
inline long ReadEEPROMValue(int16_t EEPROMStartAddress); //Reads the values from EEPROM Like Calibration , set Parameters, etc
inline void SaveEEPROMValue(int16_t EEPROMStartAddress, long Value); //Save the Value to EEPROM startingfrom the given StartAddress (4 Bytes of Data)
inline long ReadAngleFromAccelerometer(int x_Offset, int y_Offset);
inline void ResetInputBuffer(void);
inline void DrawHead(int x2, int y2, int x1, int y1, int h, int w);
inline void DisplayUserEntry(int x, int y, String userData);
// Define the Keymap
char keys[rows][cols] =
{
{
'1','2','3' }
,
{
'4','5','6' }
,
{
'7','8','9' }
,
{
'*','0','#' }
};
boolean UserEntryStarted = false;
boolean UserEntryFinished = true;
boolean InflightEntryStarted = false;
boolean InflightEntryFinished = true;
boolean DeclinationDegEntryStarted = false;
boolean DeclinationDegEntryFinished = true;
boolean DeclinationMinEntryStarted = false;
boolean DeclinationMinEntryFinished = true;
boolean East_WestEntryStarted = false;
boolean East_WestEntryFinished = true;
boolean stopFlag = true;
boolean modeValue = false; // modeValue = false (Manual Mode), modeValue = true (Auto Mode)
int inputSelection = 0; // 0 = SetPoint Input , 1 = inflight input, 2 = magneticDeclenationDegree, 3 = magneticDeclenationMinute ,4 = EAST/WEST
char KeyEntries[3]; //3 characters to store 0 to 360 Degrees
char dataBuffer[60];
char formattedDataBuffer[3];
int dx;
int dy;
int fdx;
int fdy;
int bufPtr = 0;
int CWMotor = 10;
int CCWMotor = 11;
int Stop_ResumeSignal = 12;
int Manual_Auto_Mode = 13;
int ManualSpeedControl = 9;
long UserEntry = 0;
long DegreeInput = 0;
long Inflight = 0;
long storedModeValue = 0;
long scaleMax = 0;
long angle = 0;
long previousAngle;
int dxOuter, dyOuter, dxinner, dyinner;
int magneticDeclinationDegree = 0;
int magneticDeclinationMinute = 0;
int magneticDeclinationSign = 0;
//Normal Keyboard Connected To Arduino
// Connect keypad ROW0, ROW1, ROW2 and ROW3 to these Arduino pins.
byte rowPins[rows] = {
8, 7, 6, 5 };
// Connect keypad COL0, COL1 and COL2 to these Arduino pins.
byte colPins[cols] = {
4, 3, 2 };
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, rows, cols );
UTFT utftDisplay(ILI9481,38,39,40,41);
UTFT_Geometry geo(&utftDisplay);
#define FormatData(x) strcpy_P(dataBuffer, PSTR(x))
void setup(){
Serial.begin(9600);
InitializeDisplay();
InitializeKeypad();
InitializeHMC5883();
delay(300);
ConfigureIOPins();
fdx = X;
fdy = Y;
previousAngle = 0;
DrawInitialScreen();
DegreeInput = ReadEEPROMValue(EEPROMSetpointLocation);
Inflight = ReadEEPROMValue(EEPROMInflightLocation);
if(Inflight<fixedInflight)
{
Inflight = fixedInflight;
}
storedModeValue = ReadEEPROMValue(EEPROM_ModeStatus_Location);
scaleMax = ReadEEPROMValue(EEPROM_ScaleMax_Location);
magneticDeclinationDegree = ReadEEPROMValue(EEPROMMagDeclinationDegreeLocation);
magneticDeclinationMinute = ReadEEPROMValue(EEPROMMagDeclinationMinuteLocation);
magneticDeclinationSign = ReadEEPROMValue(EEPROMMagDeclinationSignLocation);
if (storedModeValue ==0)
{
modeValue = false; //Manual Mode
}
else if (storedModeValue == 1)
{
modeValue = true; // AutoMode
}
}
void loop()
{
char key = keypad.getKey();
angle = ReadAngleFromAccelerometer(x_Offset, y_Offset);
// 1 ArcMinute = 0.0166667 = Degrees
if (magneticDeclinationSign == 1) // Magnetic Declination is POSITIVE (ie EAST)
{
angle = angle + ((magneticDeclinationDegree *60 + magneticDeclinationMinute)* 0.0166667) ;
}
else if(magneticDeclinationSign == 2) // Magnetic Declination is NEGATIVE (ie WEST)
{
angle = angle -((magneticDeclinationDegree *60 *-1 + magneticDeclinationMinute)* 0.0166667) ;
}
if((digitalRead( Stop_ResumeSignal) == false)&& stopFlag == true)
{
stopFlag = false;
}
else if((digitalRead( Stop_ResumeSignal) == false)&& stopFlag == false)
{
stopFlag = true;
}
if (stopFlag == true)
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,LOW);
stopFlag = true;
utftDisplay.setColor(0, 0, 0);
utftDisplay.print(" ", RIGHT, 25);
}
else
{
if((angle< DegreeInput )&& stopFlag == false)
{
digitalWrite(CWMotor,HIGH);
digitalWrite(CCWMotor,LOW);
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" CW ", RIGHT, 25);
}
if((angle >DegreeInput)&& stopFlag == false)
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,HIGH);
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" CCW ", RIGHT, 25);
}
if(( angle == DegreeInput)||
( angle > DegreeInput-Inflight)&&
( angle < DegreeInput+ Inflight ))
{
digitalWrite(CWMotor,LOW);
digitalWrite(CCWMotor,LOW);
stopFlag = true;
utftDisplay.setColor(0, 0, 0);
utftDisplay.print(" ", RIGHT, 25);
}
}
if((digitalRead( Manual_Auto_Mode) == false) && modeValue == false )
{
modeValue = true;
SaveEEPROMValue(EEPROM_ModeStatus_Location, 1);
}
else if((digitalRead( Manual_Auto_Mode) == false) && modeValue == true )
{
modeValue = false;
SaveEEPROMValue(EEPROM_ModeStatus_Location, 0);
}
if (modeValue == false)
{
if(stopFlag == false)
{
int spdValue = analogRead(A0);
spdValue = map(spdValue, 0, 1023, 25 , 255);
analogWrite(ManualSpeedControl, spdValue);
}
else
{
analogWrite(ManualSpeedControl, 0);
}
utftDisplay.setColor(0, 255, 255);
utftDisplay.print("Manual ", RIGHT, 295);
}
else
{
if(stopFlag == false)
{
int rotationValue =(int)abs(DegreeInput- angle); /* Irrespective of the Direction the difference in value needs to be considered for PWM
// , Stoping is based on Cw/CCW outputs*/
//Use Serial Print to check the value of rotationValue variable
int scaleRotationValue = rotationValue *8;
int scaleMaxValue = scaleMax *8;
int newSpeedValue = map(scaleRotationValue,0,scaleMaxValue, 30,255); //The Scaling needs to be fine tuned based on the Test.
analogWrite(ManualSpeedControl, newSpeedValue);
}
else
{
analogWrite(ManualSpeedControl, 0);
}
utftDisplay.setColor(0, 255, 255);
utftDisplay.print(" Auto ", RIGHT, 295);
}
utftDisplay.setFont(SevenSegmentFull);
utftDisplay.setColor(255, 0, 127);
int a = (int)angle;
sprintf(formattedDataBuffer, FormatData("%03d"),a);
utftDisplay.print(formattedDataBuffer, LEFT, 113);
utftDisplay.setColor(RED);
utftDisplay.drawCircle(320,160,9);
utftDisplay.fillCircle(320,160,9);
dx = (dm *.9 * cos((angle-90)*3.14/180)) + X; // calculate X position
dy = (dm *.9 * sin((angle-90)*3.14/180)) + Y; // calculate Y position
utftDisplay.setColor(BLACK);
DrawHead(fdx,fdy, X, Y, 10, 10); // Erase Previous Head
if( angle < (previousAngle + 2) && angle > (previousAngle - 2) )
{
delay(250);
angle = previousAngle;
}
utftDisplay.setColor(RED);
DrawHead(dx,dy, X, Y, 10,10); // Draw Head in new position
fdx = dx;
fdy = dy;
previousAngle = angle;
if(UserEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(DegreeInput,100,175);
}
if(InflightEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(Inflight,100,200);
}
if(DeclinationDegEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(magneticDeclinationDegree,100,230);
}
if(DeclinationMinEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
utftDisplay.printNumI(magneticDeclinationMinute,142,230);
}
if(East_WestEntryFinished == true)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(0, 255, 0);
if(magneticDeclinationSign == 1)
{
utftDisplay.print("E",180,230);
}
else if(magneticDeclinationSign == 2)
{
utftDisplay.print("W",180,230);
}
}
utftDisplay.setColor(0, 100, 255);
if((angle < 22.5) && (angle > 337.5 ))utftDisplay.print(" North", LEFT, 260);
if((angle > 22.5) && (angle < 67.5 )) utftDisplay.print("North-East", LEFT, 260);
if((angle > 67.5) && (angle < 112.5 ))utftDisplay.print(" East", LEFT, 260);
if((angle > 112.5) && (angle < 157.5 ))utftDisplay.print("South-East", LEFT, 260);
if((angle > 157.5) && (angle < 202.5 ))utftDisplay.print(" South", LEFT, 260);
if((angle > 202.5) && (angle < 247.5 ))utftDisplay.print("South-West", LEFT, 260);
if((angle > 247.5) && (angle < 292.5 ))utftDisplay.print(" West", LEFT, 260);
if((angle > 292.5) && (angle < 337.5 ))utftDisplay.print("North-West", LEFT, 260);
}
void InitializeDisplay()
{
utftDisplay.InitLCD();
utftDisplay.InitLCD(LANDSCAPE);
utftDisplay.clrScr();
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 128, 0);
utftDisplay.print("ANTENNA ROTATOR ", LEFT, 12);
utftDisplay.print("CONTROLLER ", 40, 36);
utftDisplay.drawLine(440, 160, 460, 160);
utftDisplay.drawLine(180, 160, 200, 160);
utftDisplay.drawLine(320, 20, 320, 40);
utftDisplay.drawLine(320, 280, 320, 300);
utftDisplay.drawCircle(320, 160, 130);
utftDisplay.setColor(255, 255, 0);
utftDisplay.print("BEAM DIR", LEFT, 75);
utftDisplay.setFont(SmallFont);
utftDisplay.setColor(255, 100, 100);
utftDisplay.print("SET DIR", LEFT, 175);
utftDisplay.print("INFLIGHT", LEFT, 200);
utftDisplay.print("MAGNETIC",LEFT, 225);
utftDisplay.print("DECLINATION",LEFT, 245);
utftDisplay.setColor(255, 0, 0);
utftDisplay.print("O", 130, 220);
utftDisplay.print("'", 175, 220);
utftDisplay.setFont(BigFont);
utftDisplay.print("O", 95, 100);
utftDisplay.setColor(255, 255, 255);
utftDisplay.print("VU3ESV : VU2JLH",LEFT, 290);
}
void InitializeKeypad()
{
keypad.setDebounceTime(50);
keypad.setHoldTime(3000);
keypad.addEventListener(KeypadEventHandler); // Add an event listener for this keypad
}
void InitializeHMC5883()
{
// Initialize I2C communications
Wire.begin();
//Put the HMC5883 IC into the correct operating mode
Wire.beginTransmission(address); //open communication with HMC5883
Wire.write(0x02); //select mode register
Wire.write(0x00); //continuous measurement mode
Wire.endTransmission();
}
void ConfigureIOPins()
{
pinMode(ManualSpeedControl, OUTPUT);
pinMode(CWMotor,OUTPUT);
digitalWrite(CWMotor,LOW);
pinMode(CCWMotor,OUTPUT);
digitalWrite(CCWMotor,LOW);
pinMode(Manual_Auto_Mode,INPUT);
pinMode(Stop_ResumeSignal,INPUT);
analogReference(DEFAULT);
}
void DrawInitialScreen()
{
utftDisplay.setColor(0, 255, 0);
utftDisplay.drawCircle(X,Y,dm);
for (float i = 0; i <360; i = i + 22.5 )
{
utftDisplay.setColor(255, 128, 0);
dxOuter = dm * cos((i-90)*3.14/180);
dyOuter = dm * sin((i-90)*3.14/180);
dxinner = dxOuter * 0.97;
dyinner = dyOuter * 0.97;
utftDisplay.drawLine(dxOuter+X,dyOuter+Y,dxinner+X,dyinner+Y);
}
for (float i = 0; i <360; i = i + 45 )
{
utftDisplay.setColor(255, 128, 0);
dxOuter = dm * cos((i-90)*3.14/180);
dyOuter = dm * sin((i-90)*3.14/180);
dxinner = dxOuter * 0.92;
dyinner = dyOuter * 0.92;
utftDisplay.drawLine(dxinner+X,dyinner+Y,dxOuter+X,dyOuter+Y);
DisplayUserEntry((X-8),(Y-157),"N");
DisplayUserEntry((X-8),(Y+145),"S");
DisplayUserEntry((X+141),(Y-7),"E");
DisplayUserEntry((X-160),(Y-7),"W");
}
}
void KeypadEventHandler(KeypadEvent key)
{
if (key != NO_KEY)
{
switch (keypad.getState())
{
case IDLE:
case RELEASED:
break;
case HOLD:
switch (key)
{
case '6':
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
ResetInputBuffer();
UserEntry = 0;
utftDisplay.print(" ",100,200);
InflightEntryStarted = true;
InflightEntryFinished = false;
inputSelection =1 ; // Inflight
break;
case '7':
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
ResetInputBuffer();
UserEntry = 0;
utftDisplay.print(" ",100,230);
DeclinationDegEntryStarted = true;
DeclinationDegEntryFinished = false;
inputSelection = 2; //Declination Degree
break;
case '8':
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
ResetInputBuffer();
UserEntry = 0;
utftDisplay.print(" ",142,230);
DeclinationMinEntryStarted = true;
DeclinationMinEntryFinished = false;
inputSelection = 3; //Declination Minute
break;
case '9':
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
ResetInputBuffer();
UserEntry = 0;
utftDisplay.print(" ",180,230);
East_WestEntryStarted = true;
East_WestEntryFinished = false;
inputSelection = 4; //Declinatiom EAST/WEST
break;
}
break;
case PRESSED:
switch (key)
{
case '#':
if (inputSelection == 0)
{
UserEntryFinished = true;
UserEntryStarted = false;
if((UserEntry < 360) )
{
//If the User SetPoint is less than Inflight then we can't accept the set point
if(UserEntry> Inflight)
{
DegreeInput = UserEntry;
SaveEEPROMValue(EEPROMSetpointLocation, DegreeInput);
scaleMax = abs( (int)(DegreeInput- (long) angle));
SaveEEPROMValue (EEPROM_ScaleMax_Location, scaleMax);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",100,175);
stopFlag = false;
}
else
{
//Show Error in UI
}
}
else
{
utftDisplay.print(" ",100,175);
DegreeInput = ReadEEPROMValue(EEPROMSetpointLocation);
}
inputSelection = 0;
}
else if (inputSelection == 1)
{
InflightEntryFinished = true;
InflightEntryStarted = false;
if((UserEntry < maxInflight) )
{
Inflight = UserEntry;
SaveEEPROMValue(EEPROMInflightLocation, Inflight);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",100,200);
stopFlag = false;
}
else
{
utftDisplay.print(" ",100,200);
Inflight = ReadEEPROMValue(EEPROMInflightLocation);
}
inputSelection = 0;
}
else if (inputSelection == 2)
{
DeclinationDegEntryFinished = true;
DeclinationDegEntryStarted = false;
if((UserEntry < maxDeclinationDegree) )
{
magneticDeclinationDegree = UserEntry;
SaveEEPROMValue(EEPROMMagDeclinationDegreeLocation, magneticDeclinationDegree);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",100,230);
stopFlag = false;
}
else
{
utftDisplay.print(" ",100,230);
magneticDeclinationDegree = ReadEEPROMValue(EEPROMMagDeclinationDegreeLocation);
}
inputSelection = 0;
}
else if (inputSelection == 3)
{
DeclinationMinEntryFinished = true;
DeclinationMinEntryStarted = false;
if((UserEntry < maxDeclinationMinute) )
{
magneticDeclinationMinute = UserEntry;
SaveEEPROMValue(EEPROMMagDeclinationMinuteLocation, magneticDeclinationMinute);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",142,230);
stopFlag = false;
}
else
{
utftDisplay.print(" ",142,230);
magneticDeclinationMinute = ReadEEPROMValue(EEPROMMagDeclinationMinuteLocation);
}
inputSelection = 0;
}
else if (inputSelection == 4)
{
East_WestEntryFinished = true;
East_WestEntryStarted = false;
if((UserEntry == 1)||(UserEntry == 2) )
{
magneticDeclinationSign = UserEntry;
SaveEEPROMValue(EEPROMMagDeclinationSignLocation, magneticDeclinationSign);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(BLACK);
utftDisplay.print(" ",180,230);
stopFlag = false;
}
else
{
utftDisplay.print("x",180,230);
magneticDeclinationSign = ReadEEPROMValue(magneticDeclinationSign);
}
inputSelection = 0;
}
break;
case '*':
if (inputSelection ==0)
{
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
utftDisplay.print(" ",100,175);
ResetInputBuffer();
UserEntry = 0;
UserEntryStarted = true;
UserEntryFinished = false;
}
break;
case '0':
case '1':
case '2':
case '3':
case '4':
case '5':
case '6':
case '7':
case '8':
case '9':
if (bufPtr < maxDegreeDigits)
{
KeyEntries[bufPtr] = key;
bufPtr++;
UserEntry = atol (KeyEntries);
utftDisplay.setFont(BigFont);
utftDisplay.setColor(255, 0, 127);
if (UserEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,100,175);
}
if (InflightEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,100,200);
}
if (DeclinationDegEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,100,230);
}
if (DeclinationMinEntryStarted == true)
{
utftDisplay.printNumI(UserEntry,142,230);
}
if (East_WestEntryStarted == true)
{
if(UserEntry == 1)
{
utftDisplay.print("E",180,230);
}
else if(UserEntry == 2)
{
utftDisplay.print("W",180,230);
}
}
}
break;
}
break;
}
}
}
long ReadAngleFromAccelerometer(int x_Offset, int y_Offset)
{
//Tell the HMC5883 where to begin reading data
Wire.beginTransmission(address);
Wire.write(0x03); //select register 3, X MSB register
Wire.endTransmission();
//Read data from each axis, 2 registers per axis
Wire.requestFrom(address, 6);
int x,y,z; //triple axis data
if(6<=Wire.available())
{
x = Wire.read() << 8 | Wire.read();
z = Wire.read() << 8 | Wire.read();
y = Wire.read() << 8 | Wire.read();
}
return atan2((double)y + y_Offset,(double)x + x_Offset)* (180 / 3.141592654) + 180;
}
void DisplayUserEntry(int x, int y, String userData)
{
utftDisplay.setColor(RED);
utftDisplay.setFont(BigFont);
utftDisplay.print(userData,x,y);
}
void DrawHead(int x2, int y2, int x1, int y1, int h, int w)
{
float dist;
int dx, dy, x2a, y2a, x3, y3, x4, y4;
dist = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)* (y1 - y2));
dx = x1 + (w/6) * (x2 - x1) / h;
dy = y1 + (w/6) * (y2 - y1) / h;
x2a = x1 - dx;
y2a = dy - y1;
x3 = y2a + dx;
y3 = x2a + dy;
x4 = dx - y2a;
y4 = dy - x2a;
geo. drawTriangle(x2,y2,x3,y3,x4,y4);
geo.fillTriangle(x2,y2,x3,y3,x4,y4);
}
void ResetInputBuffer()
{
int length = sizeof(KeyEntries);
for (int i = 0; i < length; i++)
{
KeyEntries[i] = '\0';
}
bufPtr = 0;
}
//Reads and returns the stored value specified in the EEPROM Start Address
long ReadEEPROMValue(int16_t EEPROMStartAddress)
{
volatile EEPROMValue eepromVal;
eepromVal.Byte1 = EEPROM.read(EEPROMStartAddress);
eepromVal.Byte2 = EEPROM.read(EEPROMStartAddress+1);
eepromVal.Byte3 = EEPROM.read(EEPROMStartAddress+2);
eepromVal.Byte4 = EEPROM.read(EEPROMStartAddress+3);
return eepromVal.Value;
}
/*Stores the specified value in the EEPROM from Start Address
EEPROM Write will only happens when the stored value and new value are different.
This will save the number of Writes to the EEPROM.*/
void SaveEEPROMValue(int16_t EEPROMStartAddress, long Value)
{
volatile EEPROMValue eepromVal;
eepromVal.Value = ReadEEPROMValue(EEPROMStartAddress);
if(eepromVal.Value != Value)
{
eepromVal.Value = Value;
EEPROM.write(EEPROMStartAddress,eepromVal.Byte1);
EEPROM.write(EEPROMStartAddress+1,eepromVal.Byte2);
EEPROM.write(EEPROMStartAddress+2,eepromVal.Byte3);
EEPROM.write(EEPROMStartAddress+3,eepromVal.Byte4);
}
}
Hope this project helps :)
73's
DE VU3ESV